ADDA 模块
定位问题:ADC 和 DAC 分别解决什么问题?三种 ADC 采集方式的 CPU 占用为什么不同?正弦波为什么用查表而不是实时算?
走进 AD/DA 的奇妙世界
很多东西都可以通过电压反映——温度、光照、声音、压力,传感器把物理量变成电压,单片机要读懂这个电压,就需要 ADC。反过来,单片机要控制模拟器件,就需要 DAC 把数字值变回电压。
-
ADC(模数转换):把连续变化的模拟电压 → 离散的数字值,让单片机能处理
-
DAC(数模转换):把数字值 → 模拟电压,让单片机能驱动模拟器件
ADC 基础概念
模拟 vs. 数字
-
模拟:像音量旋钮,可以连续变化,有无限多个可能的值
-
数字:像计算器按键,只有有限的离散状态(0, 1, 2…)
ADC 的任务就是把模拟信号"采样"并"量化"成数字值。
分辨率
分辨率决定 ADC 能把模拟电压"切"成多少份,用"位"表示。
分辨率越高,测量越精确,但转换速度可能越慢,成本也越高。
GD32 ADC 支持 12 位 → 2¹² = 4096 个级别 → 最小分辨电压 = 3.3V / 4096 ≈ 0.8mV
参考电压 Vref
ADC 的"标尺",定义了能测的最大电压。输入电压不能超过 Vref。
数字值 = 输入电压 / Vref × (2^分辨率 - 1)
GD32 通常 Vref = 3.3V(连接到 Vdda)。
采样率
ADC 每秒进行多少次转换,单位 SPS(Samples Per Second)。
做信号测量需要考虑——奈奎斯特采样定理:采样率必须至少是被测信号最高频率的 2 倍,否则信号失真(混叠)。
硬件连接:捕捉模拟信号

上图:ADC 引脚在开发板上的位置。

上图:引脚编号与 ADC 通道对应关系(如 PA0 → ADC1_IN0)。
找到 ADC 输入引脚:查阅开发板原理图或引脚定义,在 CubeMX 中可配置为 ADC 输入通道。

上图:电位器分压接法,模拟信号源连接到 ADC 引脚的典型方式。

上图:GND 共地连接,模拟信号源的地线必须和单片机地线接在一起。
连接模拟信号源:将信号源(电位器、传感器分压电路等)连接到选定的 ADC 引脚。
连接地线(GND):模拟信号源的地线必须与 GD32 共地,这是保证测量准确的基础。
(可选)连接 Vref:通常直接用板子的 3.3V 供电即可。
注意:输入电压绝对不能超过 0V ~ Vref(3.3V)范围。GND 必须接!
ADC 轮询法:最直接的读取方式
蓝桥杯单片机就是轮询读取,是最简单的方案。
想象去楼下信箱取信:
-
你走到信箱旁 →
HAL_ADC_Start(&hadc1)启动一次转换 -
你站那一直等,直到邮递员把信投进去 →
HAL_ADC_PollForConversion循环检查完成标志,直到超时 -
投完后你打开信箱取出信件 →
adc_val = HAL_ADC_GetValue(&hadc1)读取结果
等待期间 CPU 基本被"卡住"了,不能干别的事。简单但效率低,只适合简单验证场景。
代码实现
先说代码再说配置:
void adc_read_by_polling(void)
{
// 1. 启动 ADC 转换
HAL_ADC_Start(&hadc1);
// 2. 等待转换完成(阻塞式,最多等 1000ms)
if (HAL_ADC_PollForConversion(&hadc1, 1000) == HAL_OK)
{
// 3. 读取数字结果(12位:0-4095)
adc_val = HAL_ADC_GetValue(&hadc1);
// 4. 换算电压(可选)
voltage = (float)adc_val * 3.3f / 4096.0f;
my_printf(&huart1, "ADC Value: %lu, Voltage: %.2fV\n", adc_val, voltage);
}
else
{
// 转换超时处理
}
// 5. 若 CubeMX 配置为连续转换模式,读完需要手动停止
// HAL_ADC_Stop(&hadc1);
}
逻辑分解:
-
HAL_ADC_Start:通知 ADC 硬件启动一次转换 -
HAL_ADC_PollForConversion:不断检查 EOC(End of Conversion)标志位,阻塞函数,等待期间 CPU 卡在这里 -
HAL_ADC_GetValue:转换完成后从数据寄存器读结果(0~4095) -
电压换算:
adc_val / 4096.0 × 3.3V -
单次转换模式 ADC 完成后自动停止,连续模式需手动调
HAL_ADC_Stop
关键变量:
-
__IO uint32_t adc_val:__IO即volatile,提示编译器不要优化这个变量(中断/DMA 模式下很重要) -
__IO float voltage:浮点电压值 -
extern ADC_HandleTypeDef hadc1:所有 ADC 操作通过这个句柄进行
轮询法的局限性:等待期间反复检查状态,无法执行其他任务。只适用于实时性要求不高的简单场景。
CubeMX 配置

上图:ADC 基础参数配置界面,分辨率选 12 bits,数据对齐选 Right alignment,转换模式选 Single。
配置要点(课件补充):
ADC 模式与分辨率:
-
分辨率选 12 bits(最精确)
-
数据对齐选 Right alignment(右对齐,读出值即为 0~4095)
- Left alignment:数据存在高位,读出后需右移 4 位
-
转换模式:Single(单次)适合轮询;Continuous(连续)适合 DMA
ADC 时钟配置:
-
ADCCLK = ADC 时钟源 / 预分频值
-
频率越高转换越快,但不能超过芯片手册规定的最大值
-
F1 系列最大 14MHz,F4 系列可达 36MHz
-
GD32F470 查手册确认,参数不能照抄
-
-
总转换时间 = 采样时间 + N × (1/ADCCLK),N 为分辨率位数
ADC 采样时间:
-
信号源阻抗越高,需要越长的采样时间让内部电容充电
-
低阻抗(运放输出 <1kΩ):1.5 或 7.5 cycles
-
中阻抗(电位器 1k~50kΩ):28.5 或 55.5 cycles
-
高阻抗(>50kΩ):71.5 或 239.5 cycles,或加前置运放跟随器
-
-
采样时间过短 → 结果偏低;过长 → 降低最大采样率
然后 Generate Code:

上图:点击 Generate Code 后 CubeMX 生成工程代码。
运行结果

上图:串口助手显示 ADC 数值和对应电压,轮询法运行结果。
ADC DMA + 定时处理:解放 CPU 的初步尝试
无脑的转化,无脑的搬运。这是适合打控制的方案(电赛测控类场景很常用)。
请出强大帮手 DMA(Direct Memory Access)。思路是:
-
配置 ADC 工作在连续转换模式
-
配置 DMA 通道,ADC 每完成一次转换后自动将结果搬运到内存缓冲区
-
DMA 配置为循环模式(Circular Mode),缓冲区写满后自动从头覆盖
-
不启用中断,CPU 在自己的定时任务中定期读取缓冲区
-
对缓冲区中的多个采样值求平均得到更稳定的读数
代码实现(单通道)
#define ADC_DMA_BUFFER_SIZE 32
uint32_t adc_dma_buffer[ADC_DMA_BUFFER_SIZE]; // 推荐 uint32_t 而非 uint16_t
__IO uint32_t adc_val;
__IO float voltage;
// 初始化(调用一次,DMA 后台持续运行)
void adc_dma_init(void)
{
HAL_ADC_Start_DMA(&hadc1, (uint32_t*)adc_dma_buffer, ADC_DMA_BUFFER_SIZE);
}
// 任务中定期调用
void adc_task(void)
{
uint32_t adc_sum = 0;
for(uint16_t i = 0; i < ADC_DMA_BUFFER_SIZE; i++)
adc_sum += adc_dma_buffer[i];
adc_val = adc_sum / ADC_DMA_BUFFER_SIZE;
voltage = ((float)adc_val * 3.3f) / 4096.0f;
my_printf(&huart1, "Average ADC: %lu, Voltage: %.2fV\n", adc_val, voltage);
}
问:能写成 sizeof(adc_dma_buffer) 吗?
HAL_ADC_Start_DMA(&hadc1, (uint32_t*)adc_dma_buffer, sizeof(adc_dma_buffer)); // ❌
不行。HAL_ADC_Start_DMA 第三个参数是元素个数,不是字节数。sizeof(adc_dma_buffer) 返回字节数(uint32_t[32] = 128 字节),而不是 32 个元素。应该用 ADC_DMA_BUFFER_SIZE。
为什么缓冲区用 uint32_t 而不是 uint16_t:
STM32/GD32 的 ADC 数据寄存器(DR)是 32 位的,即使有效数据只有 12 位。DMA 以 Word(32位)传输可以最高效地匹配硬件,保证内存对齐。如果用 uint16_t 缓冲区:DMA 每次写 32 位会覆盖相邻两个 uint16_t 元素,通常能工作但严格来说是未定义行为。推荐定义为 uint32_t,处理时取低16位:
uint32_t adc_dma_buffer[ADC_DMA_BUFFER_SIZE];
// 处理时只用低16位
adc_sum += (uint16_t)adc_dma_buffer[i];
如果坚持用 uint16_t 缓冲区,则需在 CubeMX 中将 DMA 内存宽度改为 Half Word(16位)。
CubeMX 配置

上图:ADC DMA Settings 配置界面,添加 DMA 请求并设置参数。
ADC DMA 配置要点(课件补充):
-
在 ADC 的 DMA Settings 标签页点 Add 添加 DMA 请求
-
Mode:Circular(连续采样核心配置,自动循环)
-
Increment Address:Memory 勾选,Peripheral 不勾选
-
Data Width:Peripheral: Word,Memory: Word(推荐)
-
DMA 配置与触发方式、连续转换模式、NVIC 设置紧密关联,需协同配置
记得回到之前配置图片所示(DMA 模式和轮询法的 CubeMX 配置有区别):

上图:与轮询法配置对比,DMA 模式需要额外启用 DMA 通道。
关键变量说明:
-
adc_dma_buffer:DMA 持续写入 ADC 结果的内存区域,CPU 定期读这里 -
adc_val:对缓冲区求平均后的值 -
voltage:换算后的电压
优缺点:相比轮询极大降低 CPU 占用,无需处理中断,实现简单。但数据处理不是实时的,读取时缓冲区中混合了不同时刻的采样值——拿来求均值没问题,但不知道这批数据对应哪个时间窗口,不能做频率分析。
运行结果

上图:Mode 2 串口输出平均 ADC 值和电压,数据相对稳定。
ADC 精准采样:定时器触发 + DMA + 块处理
信号和电源题就用这种方案。
轮询法效率低,DMA+定时处理法数据处理不够实时。当需要以固定频率采样并对一批数据块集中处理时,结合定时器、DMA 和中断。
32 里的定时器不单单做定时器使用,它还可以作为 ADC/DAC 的触发源(TRGO 信号)。
思路:
-
定时器以固定频率产生触发信号(TRGO),启动 ADC 转换序列
-
DMA在每次 ADC 转换完成后,将结果从 ADC 数据寄存器搬到内存缓冲区,设置为 Normal 模式(采满 BUFFER_SIZE 个点后停止)
-
DMA 采满后触发 TC 中断(Transfer Complete)
-
中断回调里:停止 DMA,设置标志位
AdcConvEnd = 1 -
后台任务检测到标志位后:处理数据 → 清除标志 → 重启 DMA
类比:你命令机器人(DMA+ADC)去收集 1000 个样本。收集完毕后机器人举起牌子(设置 Flag)并停下来。你(CPU)看到牌子后走过去取走所有样本进行处理,处理完再命令机器人开始新一轮。
这种方式允许在采集间隙处理数据,但处理和重启 DMA 期间可能丢失连续信号,适合对数据块进行分析处理而非严格连续实时场景。
定时器基础与配置
定时器时钟源
通常选内部时钟(Internal Clock),频率与 APB 总线时钟有关(如 APB1 是 72MHz,TIM3 时钟基频通常也是 72MHz)。
预分频器(PSC)
Counter Clock = Timer Clock / (PSC + 1)
为什么是 PSC+1:计数器从 0 数到 PSC,共数了 PSC+1 次才产生一个计数周期,所以实际分频比是 PSC+1。
例:Timer Clock = 72MHz,PSC = 71 → Counter Clock = 72MHz / 72 = 1MHz(每 1µs 计一次数)
自动重装载寄存器(ARR)
触发频率 = Counter Clock / (ARR + 1)
为什么是 ARR+1:计数器从 0 数到 ARR,到达 ARR 时产生更新事件(UEV),随即重新从 0 开始,共数了 ARR+1 次。
例:Counter Clock = 1MHz,想每 10ms 触发一次(100Hz):
100 = 1,000,000 / (ARR + 1) → ARR = 9999
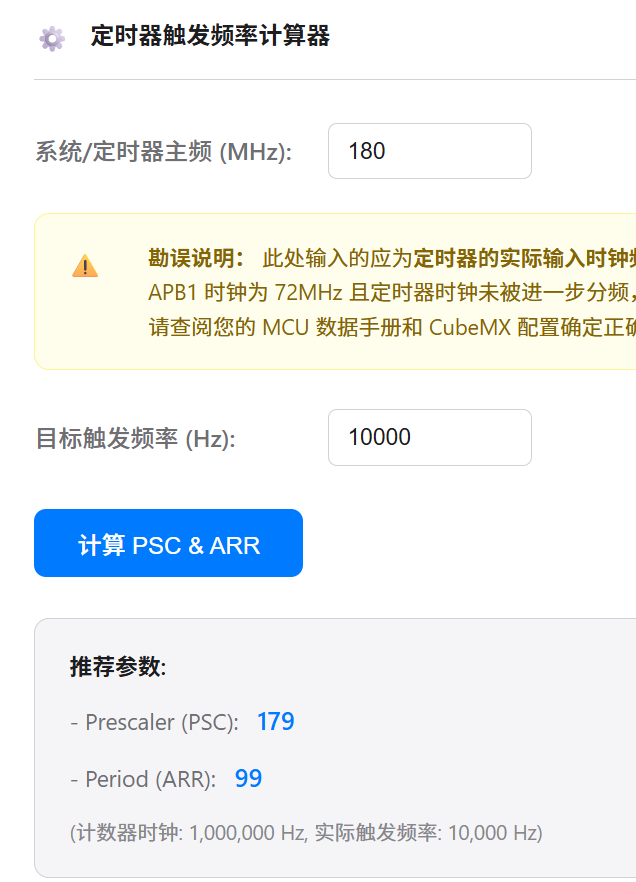
通过组合 PSC 和 ARR 可以精确配置出所需触发频率。课件里有对应的计算器工具。
触发输出(TRGO)
将定时器的更新事件(UEV)输出为 TRGO 信号,触发 ADC 或 DAC 外设转换。CubeMX 中设置 Trigger Output 为 “Update Event”。
ADC 时钟配置补充(课件扩充内容):
ADC 有独立的时钟配置:
ADCCLK = ADC 时钟源 / 预分频值
转换时间 = 采样时间 + N × (1/ADCCLK)
ADCCLK 越高转换越快,但不能超过芯片手册的 fADC_max。GD32F470 参数查手册,不能直接用 STM32 F4 系列参数。
ADC 外部触发配置(课件补充):
-
Software Trigger:软件调用
HAL_ADC_Start()手动触发(轮询/简单中断用) -
Timer x Trigger Out event:定时器 TRGO 触发(精确固定频率采样用)
-
使用定时器触发时:Continuous Conversion Mode 必须设为 Disabled,否则外部触发只在第一次生效
-
触发边沿:定时器触发通常选 Rising edge
ADC 与 DMA 配置
CubeMX 配置步骤:

上图:ADC 外部触发配置,选择定时器 TRGO 作为触发源,边沿选上升沿。
上图:DMA 配置为 Normal 模式(非 Circular),采满后停止触发 TC 中断。

上图:NVIC 配置,启用 ADC 全局中断和 DMA 通道中断。

上图:ADC 配置为多通道扫描,Rank1 和 Rank2 分别对应两个采集通道。

上图:Mode 3 完整 CubeMX 配置概览。
ADC 扫描模式设置(课件补充):
-
Scan Conversion Mode:多通道扫描时设为 Enabled,单通道设为 Disabled
-
Number Of Conversion:扫描通道数(本工程配了 2 个通道)
-
EOC Selection:配合 DMA 读整个序列时选 End of sequence conversion
-
多通道配置后,DMA 缓冲区中数据交错存储:
[ch1, ch2, ch1, ch2, ...]
ADC 中断配置(课件补充):
-
轮询法:无需启用中断
-
DMA + 定时处理(Mode 2):通常无需启用中断
-
TIM + DMA + 中断(Mode 3):需启用 ADC 全局中断 + DMA 通道中断
-
HAL_ADC_ConvCpltCallback:由 DMA TC(全传输完成)中断触发,在此处设标志位 -
回调内只做快速操作,耗时处理放主循环
-
代码实现
参考工程代码(ADC_MODE == 3):
#define BUFFER_SIZE 1000
extern DMA_HandleTypeDef hdma_adc1;
uint32_t dac_val_buffer[BUFFER_SIZE / 2];
__IO uint32_t adc_val_buffer[BUFFER_SIZE];
__IO uint8_t AdcConvEnd = 0;
void adc_tim_dma_init(void)
{
HAL_TIM_Base_Start(&htim3); // 启动触发定时器
HAL_ADC_Start_DMA(&hadc1, (uint32_t*)adc_val_buffer, BUFFER_SIZE); // 启动 DMA 采集
__HAL_DMA_DISABLE_IT(&hdma_adc1, DMA_IT_HT); // 禁用半传输中断
}
// DMA 全传输完成回调(中断里自动触发)
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
UNUSED(hadc);
if(hadc == &hadc1)
{
HAL_ADC_Stop_DMA(hadc); // 停止采集(Normal 模式也会自动停,这里显式停)
AdcConvEnd = 1; // 通知后台任务
}
}
void adc_task(void)
{
// 一次转换 3 + 12.5 = 15.5 个 ADC 时钟周期
// 一次转换 15.5 / 22.5 ≈ 0.68µs
// 1000 个点 ≈ 0.68ms,但定时器触发间隔更长,实际约 10ms
if(AdcConvEnd)
{
// 多通道交错数据,取通道2(奇数索引)
for(uint16_t i = 0; i < BUFFER_SIZE / 2; i++)
dac_val_buffer[i] = adc_val_buffer[i * 2 + 1];
for(uint16_t i = 0; i < BUFFER_SIZE / 2; i++)
my_printf(&huart1, "{dac}%d\r\n", (int)dac_val_buffer[i]);
memset(dac_val_buffer, 0, sizeof(uint32_t) * (BUFFER_SIZE / 2));
// 重启下一批采集
HAL_ADC_Start_DMA(&hadc1, (uint32_t*)adc_val_buffer, BUFFER_SIZE);
__HAL_DMA_DISABLE_IT(&hdma_adc1, DMA_IT_HT);
AdcConvEnd = 0;
}
}
i*2+1 的原因:ADC 配了 2 个通道扫描,DMA 数据交错存储:
adc_val_buffer[0] → 通道1(如外部输入)
adc_val_buffer[1] → 通道2(如 DA 回采)← i*2+1 取的是这个
adc_val_buffer[2] → 通道1
adc_val_buffer[3] → 通道2
...
调度器可以改成 10 了,之前 100 是因为什么?
之前做 UART、GPIO 等任务时,没有 ADC 采集需求,100ms 任务周期足够。现在 1000 个点每次约 0.68ms 采完,需要更快处理频率,改成 10ms 更合适。
注意事项:
-
DMA 必须设 Normal 模式,采满停止才能触发 TC 中断
-
adc_task处理时间必须小于数据块采集间隔,否则会延迟下一次采集 -
处理和重启 DMA 期间 ADC 不在采集,数据会不连续——不适合需要无缝数据流的场景
DAC 基础概念
DAC 把单片机的数字值转换为模拟电压,就像"乐谱演奏家",把数字乐谱变成实际声波。
分辨率
12 位 DAC 将数字值(0~4095)映射到输出电压的 4096 个等级,点数越多输出越平滑。
参考电压 Vref
输出电压 = Vref × 数字值 / 2^分辨率
对于 12 位 DAC,Vref = 3.3V:
-
数字值 0 → 输出 ≈ 0V
-
数字值 4095 → 输出 ≈ 3.3V
-
数字值 2048 → 输出 ≈ 3.3 × 2048/4096 = 1.65V
建立时间
DAC 将数字值变成电压需要一定时间稳定,这限制了最高输出频率。
输出缓冲
DAC 内置运放缓冲器,开启后:
-
提高驱动能力:可直接驱动小阻抗负载而电压不跌落
-
降低输出阻抗:输出更稳定
CubeMX 中通常选 Enable。
DAC + DMA 输出正弦波
作业内容包含这一部分。
思路(查表法)
实时调 sinf() 是浮点运算,CPU 越忙频率越难保证,时序抖动大。查表法:
-
提前算好一个周期 100 个点的正弦值存进数组(查找表 LUT)
-
定时器以固定频率产生 TRGO 信号(“节拍器”)
-
DAC 每次接收到触发就从查找表取下一个点输出
-
DMA 配置为 Circular 模式,自动循环喂数据
-
一旦启动,CPU 完全不需要干预,硬件自动循环输出
类比:你把一首歌的乐谱(查找表)交给自动翻页机(DMA),设置一个节拍器(Timer)控制演奏机器人(DAC)。节拍器每响一次,翻页机就把下一个音符喂给机器人,机器人立刻演奏。整个过程自动化,你只需启动它们。
频率控制
正弦波频率 = 定时器触发频率 / 每周期采样点数
想输出 1kHz,查找表 100 个点:
定时器触发频率 = 1kHz × 100 = 100kHz(每 10µs 触发一次)
改频率的两种方法:改定时器频率,或改查找表点数。
代码实现
#define SINE_SAMPLES 100
#define DAC_MAX_VALUE 4095
uint16_t SineWave[SINE_SAMPLES];
// 生成查找表
void Generate_Sine_Wave(uint16_t* buffer, uint32_t samples,
uint16_t amplitude, float phase_shift)
{
float step = 2.0f * 3.14159f / samples;
for(uint32_t i = 0; i < samples; i++)
{
float sine_value = sinf(i * step + phase_shift); // sinf 比 sin 更快(单精度)
// 映射到 DAC 范围(0~4095):
// 1. sine_value(-1~1) × amplitude → (-amp ~ +amp)
// 2. 加上中心值(4095/2≈2047.5) → 整体上移到 0~4095
buffer[i] = (uint16_t)(sine_value * amplitude + DAC_MAX_VALUE / 2.0f);
// 钳位:浮点误差可能略超边界
if(buffer[i] > DAC_MAX_VALUE) buffer[i] = DAC_MAX_VALUE;
}
}
// 初始化(调用一次,硬件自动循环输出)
void dac_sin_init(void)
{
// 生成最大幅度的正弦波(0~4095)
Generate_Sine_Wave(SineWave, SINE_SAMPLES, DAC_MAX_VALUE / 2, 0.0f);
HAL_TIM_Base_Start(&htim6); // 启动节拍定时器
// 启动 DAC DMA 循环输出
HAL_DAC_Start_DMA(&hdac, DAC_CHANNEL_1,
(uint32_t*)SineWave, SINE_SAMPLES,
DAC_ALIGN_12B_R);
}
// 无需后台任务,硬件自动循环
CubeMX 配置

上图:DAC 配置界面,Output Buffer 选 Enable,Trigger 选对应定时器的 TRGO。
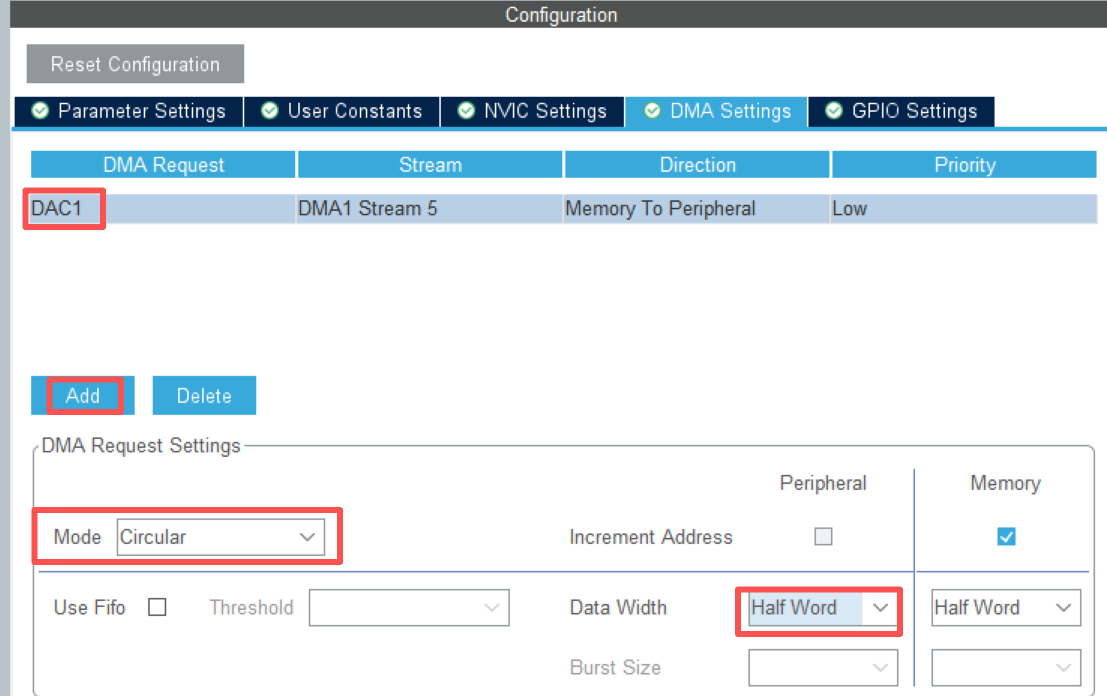
上图:DAC DMA Settings,Direction 为 Memory to Peripheral,Mode 为 Circular。

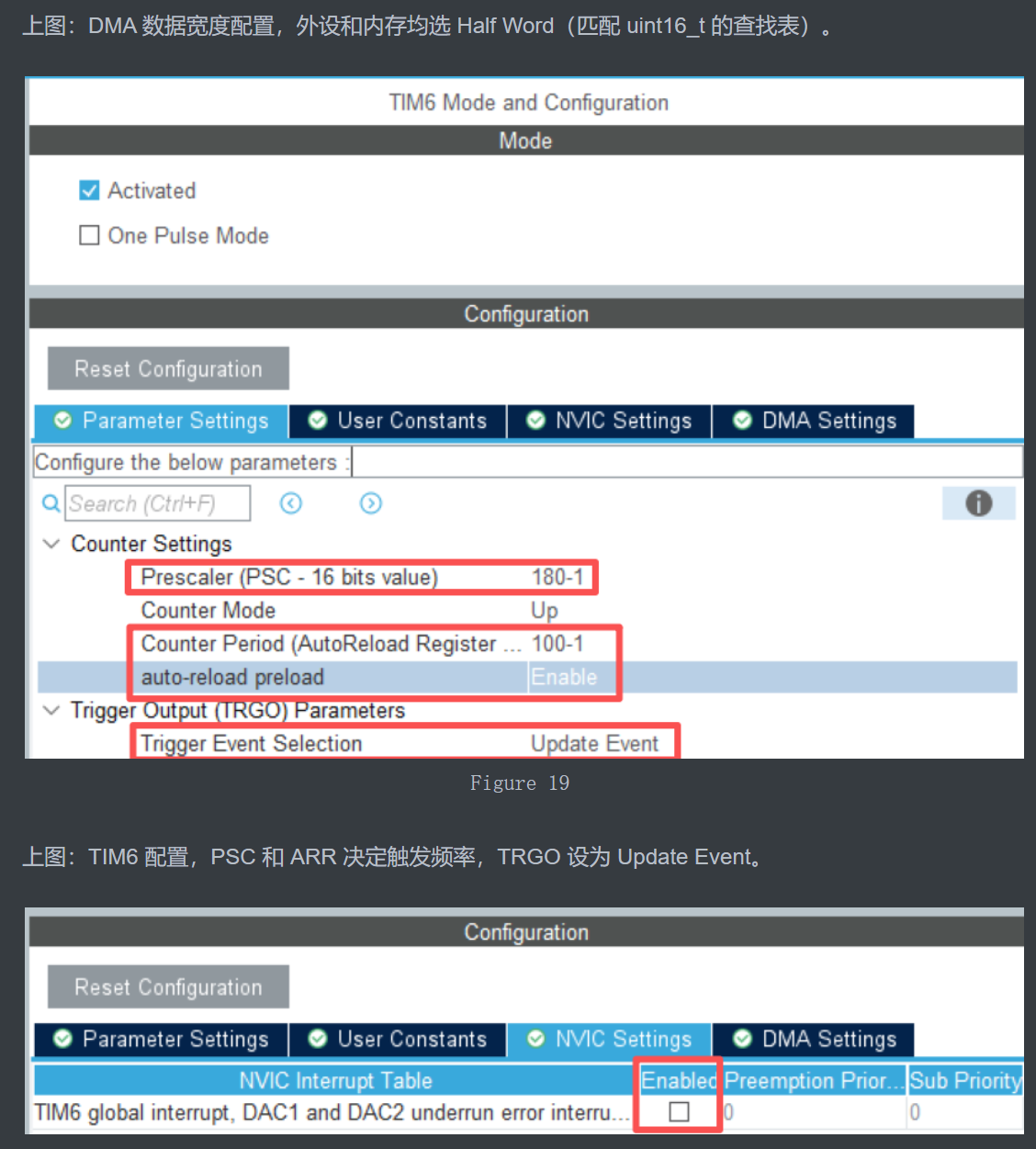
上图:DMA 数据宽度配置,外设和内存均选 Half Word(匹配 uint16_t 的查找表)。
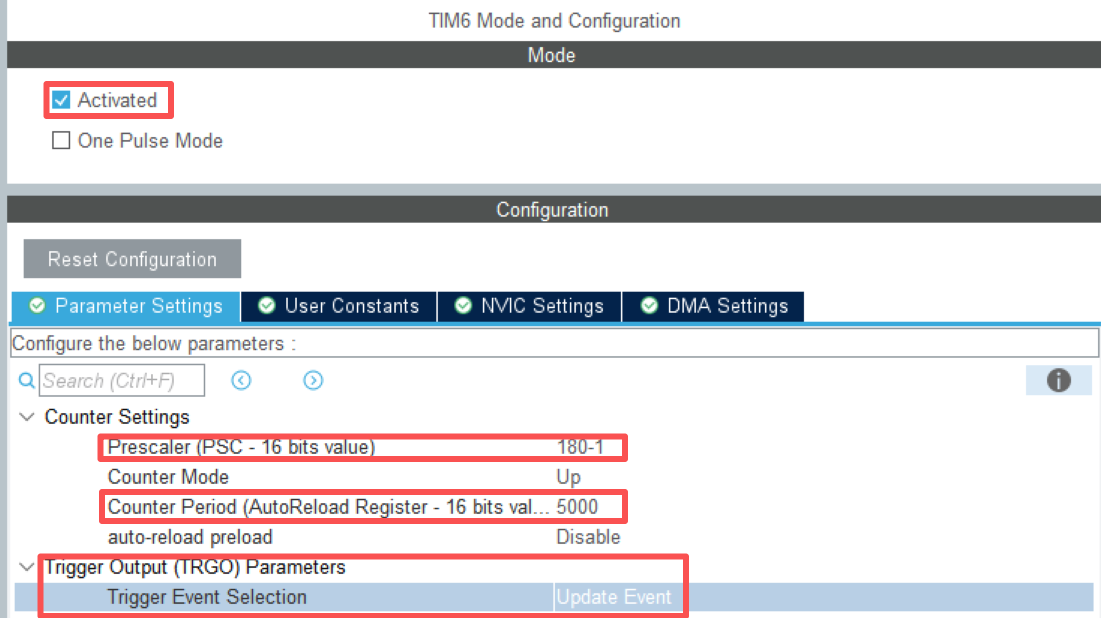
上图:TIM6 配置,PSC 和 ARR 决定触发频率,TRGO 设为 Update Event。

上图:定时器和 DAC 联动配置完整截图,确认 TRGO 与 DAC Trigger 匹配。
DAC 输出与触发(课件补充):
-
Output Buffer:推荐 Enable(提高驱动能力)
-
Trigger:手动输出固定电压选 None;DMA 波形输出选定时器 TRGO
DAC DMA 配置(课件补充):
-
Direction:Memory to Peripheral(内存→外设,与 ADC 方向相反)
-
Mode:Circular(循环读取查找表)
-
Data Width:Peripheral: Half Word,Memory: Half Word(匹配
uint16_t SineWave[])- 注意:DAC 用 Half Word,ADC 用 Word,两者不同
-
Memory 地址递增,Peripheral 地址固定
-
纯 DAC 输出通常不需要启用中断
DAC 内建波形(课件补充,了解即可):
-
部分 STM32/GD32 支持硬件直接生成噪声波(LFSR 伪随机)和三角波
-
需要定时器触发,不能同时用 DMA 自定义波形
-
需要复杂波形(正弦、任意波)时,禁用内建波形,用 DMA 模式
多通道采集配置

上图:ADC 配置两个通道,Rank1 和 Rank2 分别接 DA 回采和外部输入。
DA 回采结构:把 DA 输出引脚(PA4)和 AD 输入引脚(PA5)用导线短接,AD 采集自己 DA 发出的信号。这样可以验证波形频率、幅度,做信号分析。
记得把 PA4 和 PA5 短接了。
Mode 3 的完整 adc_task(含 DA 回采)
void adc_task(void)
{
// 一次转换 3 + 12.5 = 15.5 个 ADC 时钟周期
// 一次转换 15.5 / 22.5 ≈ 0.68µs
// 1000 个点 ≈ 0.68ms
if(AdcConvEnd)
{
for(uint16_t i = 0; i < BUFFER_SIZE / 2; i++)
dac_val_buffer[i] = adc_val_buffer[i * 2 + 1]; // 取通道2(DA回采)
for(uint16_t i = 0; i < BUFFER_SIZE / 2; i++)
my_printf(&huart1, "{dac}%d\r\n", (int)dac_val_buffer[i]);
memset(dac_val_buffer, 0, sizeof(uint32_t) * (BUFFER_SIZE / 2));
HAL_ADC_Start_DMA(&hadc1, (uint32_t*)adc_val_buffer, BUFFER_SIZE);
__HAL_DMA_DISABLE_IT(&hdma_adc1, DMA_IT_HT);
AdcConvEnd = 0;
}
}
运行结果与问题

上图:串口助手显示采集到的正弦波数据,可以看到波形不连续。
为什么数据不是连续的?
因为:
my_printf(&huart1, "{dac}%d\r\n", (int)dac_val_buffer[i]);
每次打印都需要时间(UART 串行发送),500 个点连续打印耗时远超采集时间,所以串口看到的是一段一段的数据,不是平滑连续的波形。这是串口打印本身的限制,不是采集的问题。
如果需要看连续波形,应该:用示波器直接看 PA4(DAC 输出引脚),或采集足够多周期的数据后用上位机绘图。
只要能打出两个周期以上的数据,就可以分析频率、幅度等特性。
问:改成 %.1f 打印浮点数会发生什么?
my_printf(&huart1, "{dac}%.1f\r\n", (float)dac_val_buffer[i]); // ❌
浮点格式化比较消耗栈,容易卡死,不建议打印浮点数。 浮点 printf 会调用软件浮点库,栈消耗大,加上串口本来就慢,容易导致调度器超时或栈溢出。用整数打印,需要时在上位机处理换算。
深入 HAL 库 API
ADC 相关
| 函数 | 用途 |
|---|---|
HAL_ADC_Start |
启动一次 ADC 转换(轮询/中断用) |
HAL_ADC_Stop |
停止转换(连续模式需要) |
HAL_ADC_PollForConversion |
阻塞等待转换完成,超时返回 TIMEOUT |
HAL_ADC_GetValue |
读取转换结果(0~4095) |
HAL_ADC_Start_DMA |
DMA 模式启动,第三参数是元素个数不是字节数 |
HAL_ADC_Stop_DMA |
停止 DMA 模式采集 |
HAL_ADC_ConvCpltCallback |
DMA TC 中断或转换完成回调,用户重写此函数 |
__HAL_DMA_DISABLE_IT |
宏,禁用指定 DMA 中断(如 DMA_IT_HT 半传输中断) |
HAL_ADC_Start_DMA 参数说明:
-
pData:uint32_t*类型(即使缓冲区是 uint16_t 也需要强转) -
Length:元素个数,不是字节数
HAL_ADC_ConvCpltCallback:
-
非 DMA 模式:由 ADC EOC 中断触发
-
DMA 模式:由 DMA **TC(全传输完成)**中断触发,这是 DMA 模式处理整块数据的主要入口
__HAL_DMA_DISABLE_IT(&hdma_adc1, DMA_IT_HT):禁用半传输中断,只用全传输中断,防止意外触发回调。
DAC 相关
| 函数 | 用途 |
|---|---|
HAL_DAC_Start |
启动指定 DAC 通道(非 DMA 模式) |
HAL_DAC_Stop |
停止指定 DAC 通道 |
HAL_DAC_SetValue |
手动设置 DAC 输出值(hdac, Channel, Alignment, Data) |
HAL_DAC_Start_DMA |
DMA 模式启动 DAC,循环输出查找表 |
HAL_DAC_Stop_DMA |
停止 DMA 模式 DAC 输出 |
HAL_DAC_Start_DMA 参数说明:
-
Alignment:数据对齐方式,常用DAC_ALIGN_12B_R(12位右对齐) -
pData:同样需要uint32_t*强转(即使是 uint16_t 查找表)
TIM 相关
| 函数 | 用途 |
|---|---|
HAL_TIM_Base_Start |
启动定时器,开始产生 TRGO 信号 |
一旦定时器启动并以配置频率产生 UEV(更新事件),TRGO 信号就会触发 ADC 采集或 DAC 输出。
作业
1. DA 可以发送正弦波、方波、三角波
2. 按键可以控制波形的周期
3. 旋钮可以控制波形的峰峰值
4. 串口最少可以打印出两个周期的波形(可以启动/暂停)
5. 可以通过串口查询指令进行参数查询:
- 波形类型(通过 DA 发送的模式变量读取,或通过 AD 数据分析)
- 频率(不能从定时器直接读出,必须通过 AD 采集数据计算)
- 峰峰值(不能从定时器直接读出,必须通过 AD 采集数据计算)
6. 可以通过串口控制指令进行模式切换和参数设置(波形、周期、峰峰值,指令集自定)
这节课对后续比赛/工程的价值
-
PT100 采样板用的就是 ADC + DMA,这节学完能看懂采样板的软件驱动逻辑
-
TIM + DMA + 中断是工业数据采集的标准模式,后续做频率测量、FFT 分析都要用到
-
DAC 正弦波 + ADC 回采是信号验证的经典手段,比赛里可能直接考这个结构
-
查表法是嵌入式节省 CPU 的通用思路,不只适用于正弦波
-
Mode 2(DMA + 定时处理)适合电赛测控类(慢变化信号、只需均值)
-
Mode 3(块处理)适合分析类(需要对一批数据做整体处理)
速查卡
| 关键点 | 一句话 |
|---|---|
| ADC 轮询 | Start → PollForConversion(阻塞)→ GetValue |
| ADC DMA Circular | 一次启动,DMA 持续循环填充,CPU 定期取均值,适合测控 |
| ADC TIM+DMA Normal | 采满停,TC 中断设标志,任务处理后重启,适合信号分析 |
| sizeof 陷阱 | HAL_ADC_Start_DMA 第三参数是元素个数,不是字节数 |
| 多通道交错 | i*2 取通道1,i*2+1 取通道2 |
| DAC 正弦波 | 查表 + 定时器触发 + DMA Circular,CPU 启动一次不用管 |
| 正弦波频率 | = 定时器触发频率 / 每周期点数 |
| DA 回采 | PA4(DAC)短接 PA5(ADC),自测信号 |
| 不用浮点打印 | float printf 耗栈容易卡死,用整数打印 |
| PSC/ARR 公式 | Counter Clock = TimerClk/(PSC+1),触发频率 = CC/(ARR+1) |